
|
Содержание
Вопросы электромеханики т.119, 6'2010 cc 25-30
Некрасов Виктор Владимирович, канд. техн. наук
Макушева Екатерина Владимировна, аспирантка
(ФГУП «НПП ВНИИЭМ»)
АННОТАЦИЯ
Настоящая работа посвящена разработке математического описания геометрической модели панхроматической и многозональной съемочных систем перспективных космических комплексов типа «Канопус-В». Целью работы является формирование математического описания съемочных систем, определение и учет характеристик процесса съемки, оценка потенциальной точности геопривязки снимков и возможность и точность калибровки съемочных систем по данным тестового полигона.
Ключевые слова: геометрическая модель съемки, RPC, съемочная система, тестовый полигон.
ВВЕДЕНИЕ
В настоящее время во ФГУП «НПП ВНИИЭМ» ведутся работы по созданию космического комплекса оперативного мониторинга техногенных и природных чрезвычайных ситуаций и космической системы на его основе, в состав которой входит космический аппарат (КА) дистанционного зондирования Земли (ДЗЗ) «Канопус-В». Он позволяет решать следующие задачи:
Бортовой целевой комплекс КА «Канопус-В» обеспечивает съемку участков поверхности Земли, формирование полученной информации в кадры и ее передачу на наземные пункты приема информации. В состав бортового целевого комплекса входят:
Съемка может проводиться как одновременно в панхроматическом и многозональном режимах, так и при различных комбинациях отдельных спектральных зон вплоть до съемки в одной спектральной зоне.
Динамическая геометрическая модель съемки, представляющая собой математическое описание съемочных систем, позволяет по данным об орбитальной траектории КА получить привязанные к местности снимки.
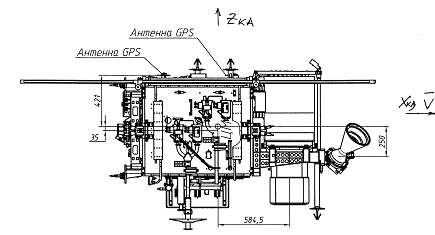
Рис. 1. Общий вид КА «Канопус-В» в условиях орбитального полета
Точность геометрической модели съемки определяется точным учетом навигационных данных вместе с геометрической моделью снимка, что позволит получить точность привязки на Земле до десятков и возможно единиц метров.
При этом точная геометрическая модель позволит генерировать специальное описание снимка (RPC – коэффициенты рациональных полиномов[1,2]) для его точной привязки в большинстве стандартных пакетов (ERDAS, ENVI и т.п.) непосредственно пользователем, без раскрытия деталей описания камеры.
Использование точной геометрической модели позволит в режиме реального времени обеспечивать точными координатами на снимке в целях оперативного мониторинга.
Построение геометрической модели рассматривается исходя из исходных данных на космический комплекс «Канопус-В».
1 Общие характеристики перспективного космического аппарата «КАНОПУС-В».
Таблица 1
Характеристики КА «Канопус-В»
Орбитальные характеристики |
||
тип орбиты |
круговая солнечно-синхронная |
|
высота орбиты |
510 км |
|
наклонение |
97,447град |
|
Характеристики КА |
||
масса |
400 кг |
|
масса полезной нагрузки |
110 кг |
|
срок активного существования |
5-7 лет |
|
точность ориентации |
не более 5 угл.мин. |
|
стабильность угловой скорости |
не хуже 0,001 град/с по каждой оси |
|
углы отклонения по крену и тангажу при проведении съемки |
± 40град |
|
Характеристики целевой аппаратуры |
||
разрядность квантования выходного сигнала |
12 |
|
объем памяти |
24 Гбайт |
|
время хранения информации |
не менее 5 суток |
|
передача информации в целевую радиолинию |
8-ми разрядный код |
|
количество каналов передачи данных |
2 |
|
скорость передачи данных |
61,44 или 122,88 Мбит/с |
|
максимальная погрешность привязки информации к бортовой шкале времени |
не более 0,1 мс |
|
погрешность выставки координатных осей съемочных систем относительно зеркальных граней угольника |
не более 1 угл.мин. |
|
время работы ЦА на витке |
до 700 с в режиме съемки и до 700 с в режиме передачи целевой информации |
|
Характеристики съемочных систем |
||
|
ПСС |
МСС |
фокусное расстояние |
1797,5 мм |
359,5 мм |
эффективное относительное отверстие |
1:10,3 |
1:5,6 |
разрешение |
2,1 м |
10,5 м |
полоса захвата |
23,3 км |
20,1 км |
количество спектральных каналов |
1 |
4 |
спектральный диапазон |
0,52 – 0,85 мкм |
0,45 – 0,52 |
Характеристики видео подсистемы
После получения видеоинформации, бортовая целевая аппаратура формирует ее в кадры. Первые строки видеоданных в матрицах расположены так, что каждый третий кадр последующей матрицы совпадает с первым кадром предыдущей матрицы. Кадр видео данных содержит 985 строк видеоданных. Каждый последующий кадр в МСС имеет с предыдущим кадром перекрытие в 57 строк. В ПСС каждый последующий кадр имеет с предыдущим кадром перекрытие в 80 строк. Между кадрами, полученными разными матрицами, перекрытие составляет 70 пикселов. Схема расположения матриц в фокальной плоскости дана на рис. 2 и 3.
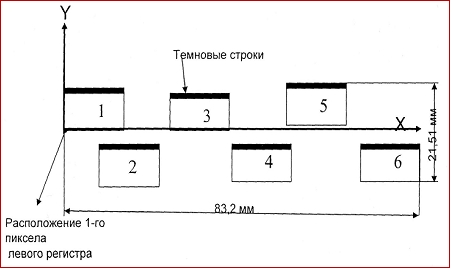
Рис. 2. Расположение матриц ПСС по паспортным данным микросборки
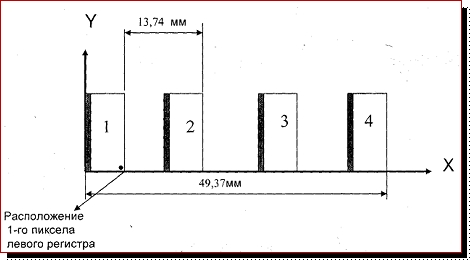
Рис. 3. Расположение матриц МСС по паспортным данным микросборки
Кадры целевой информации имеют строчную структуру. Общее количество строк кадра целевой информации (КЦИ) равно 990, длина строки 1960 байт. Каждая строка содержит четыре поля информации.
В первом поле (байты с 0 по 15) содержится синхропоследовательность.
Второе поле (байты с 16 по 1943) - область данных КЦИ.
Третье поле (байты с 1944 по 1957) - идентификатор строки.
В четвертом поле (байты с 1958 по 1959) записывается контрольная сумма строки.
Общий формат матрицы 1092 х 1992 пикселов. Матрица состоит 1920x1080 пикселов (открытых, изображающих), на которых формируется изображение. Поле «изображающих» пикселов ограничено по столбцам симметрично с двух сторон 4-мя буферными столбцами и 28 закрытыми столбцами. По строкам поле открытых пикселов ограничивают по две буферные и четыре темновых строки. В полете сохраняются 985 строк видеоданных по 1920 пикселов в каждой строке, данные по 32-м темновым столбцам, средненные по 4-м столбцам (по 4-е с каждой стороны матрицы) и 4-е последних темновых строки.
Геометрическое разрешение (проекция элемента пространственной дискретизации фотоприемника на подстилающую поверхность[4]) при съемке с высоты 510 км в надир:
- в панхроматической съемочной системе - 0,86 угл.сек;
- в многозональной съемочной системе - 4.27 угл.сек.
Линейное разрешение на местности, определяемое по стандартной трехшпальной мире по критерию предельно разрешаемого элемента при съемке в зачетных условиях наблюдения, с вероятностью 0,8 составляет:
Зачетные условия: высота 510 км, съемка в надир, высота Солнца над горизонтом более 30 угл. град, коэффициент пропускания атмосферы более 0,7, альбедо фона 0,07, контраст миры 0,3.
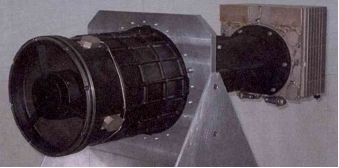
Рис. 4. Внешний вид ПСС
Рис. 5. Внешний вид МСС
Геометрическая калибровка
Для точной геопривязки микрокадров необходимо учесть смещение центра фотографирования съемочной системы от центра масс КА и поправки к углам ориентирования КА.
Смещения центра фотографирования получается из анализа конструктивных данных КА.
Положение точки фотографирования вычисляется по формуле:
Xc = Xa + Ms * (Xsc-Xsa),
где
Ms – матрица поворота
Xc – положение точки фотографирования,
Xa – точка GPS/ГЛОНАСС антенны
(Xsc-Xsa)- вектор от антенны к камере.
Данные о угловых поправках будут получены после вибрационных испытаний КА и будут уточняться по снимкам тестового полигона.
Результирующая матрица поворота для каждого микрокадра вычисляется по формуле:
Res = Ags * R,
где Ags – матрица поворота КА, вычисляемая по данным навигационной системы (звездные датчики),
R – матрица суммарных угловых поправок каждого микрокадра ПСС.
2. Математическое описание динамической геометрической модели съемки системами ПСС и МСС
Микрокадр съемочной системы ПСС и кадр съемочной системы МСС можно описать стандартной кадровой моделью [6] с 3 линейными параметрами (положение точки фотографирования) и 3 угловыми параметрами (углы внешнего ориентирования).
 , где
, где
x,y - координаты на снимке,
x0,y0 - координаты главной точки фотоснимка,
X,Y,Z - координаты на местности,
Xs,Ys,Zs - координаты точки фотографирования
a1 = cos(a)*cos(k) - sin(a)*sin(w)*sin(k)
a2 = -cos(a)*sin(k) - sin(a)*sin(w)*cos(k)
a3 = -sin(a)*cos(w)
b1 = cos(w)*sin(k)
b2 = cos(w)*cos(k)
b3 = -sin(w)
c1 = sin(a)*cos(k) + cos(a)*sin(w)*sin(k)
c2 = -sin(a)*sin(k) + cos(a)*sin(w)*cos(k)
c3 = cos(a)*cos(w)
Для каждого из 6 микрокадров ПСС индивидуальными будут смещение от главной точки, и угловые параметры ориентирования.
Для определения параметров ориентирования по опорным точкам (например, тестового полигона) необходимо представить систему нелинейных уравнений в линейном виде относительно определяемых переменных [ Xs, Ys, Zs, a, w, k], для этого воспользуемся разложением в ряд Тейлора.
x+a*dXs +b*dYs +c*dZs +d*da +e*dw +m*dk - xи = v
y+a`*dXs+b`*dYs+c`*dZs+d`*da +e`*dw +m`*dk - yи =v`
три линейных параметра - точка фотографирования

три угловых параметра - углы ориентирования
По всем опорным точкам составляется система уравнений, которая решается методом наименьших квадратов[5].
3 Динамическая геометрическая модель съемки с использованием RPC
Стандартом де-факто аппроксимирующих соотношений стали так называемые RPC (Rational Polynomial Coefficients), получившие широкое распространение в качестве геометрической модели сканерных снимков высокого разрешения. Коэффициенты RPC входят в состав продуктов ДЗЗ, получаемых спутниками IKONOS, QuickBird, WorldView, KOMPSAT, OrbView-3, Cartosat-1 (IRS P5)[3]. Нет сомнений в том, что эта тенденция распространится и на перспективные спутники, запуск которых намечен на ближайшие годы.
RPC основаны на соотношениях следующего вида, связывающих нормированные геодезические координаты точки местности с нормированными координатами её изображения на снимке:
Числители и знаменатели этих соотношений представляют собой полиномы третьей степени:
![]()
Нормировка пиксельных и геодезических координат производится так, чтобы их нормированные значения по модулю не превосходили 1, и выполняется по следующим формулам:

В комплект поставки изображения включаются коэффициенты полиномов aijk, bijk, cijk, dijk, а также параметры нормировки Ol, Os, O?, O?, Oh (Offset) и Sl,Ss, S?, S?, Sh (Scale).
Расчет коэффициентов рациональных функций производится следующим образом:
4 КАЛИБРОВКА МСС И ПСС С ИСПОЛЬЗОВАНИЕМ ЭКСПЕРИМЕНТАЛЬНОГО ТЕСТОВОГО УЧАСТКА
Для калибровки и тестирования оптико-электронных систем КК «Канопус-В» , ФГУП «Госцентр «Природа» по техническому заданию ФГУП «НПП ВНИИЭМ» подготовил экспериментальный тестовый участок, расположенный в Краснодарском крае в районе г.Пятигорска.
Для построения тестового участка, предназначенного для калибровки материалов съемки с КА «Канопус-В», были определены параметры, обеспечивающие эффективность его применения:
Место расположения тестового участка выбиралось по топографической карте масштаба 1:100 000 с учетом следующих факторов:
Проектирование и выполнение геодезических работ выполнено с учётом требований Инструкции по развитию съёмочного обоснования и съёмке ситуации и рельефа с применением глобальных навигационных спутниковых систем ГЛОНАСС и GPS (ГКИНП (ОНТА) – 02-262-02, Москва, ЦНИИГАиК, 2002 г.).
установлены следующие размеры тестового участка:
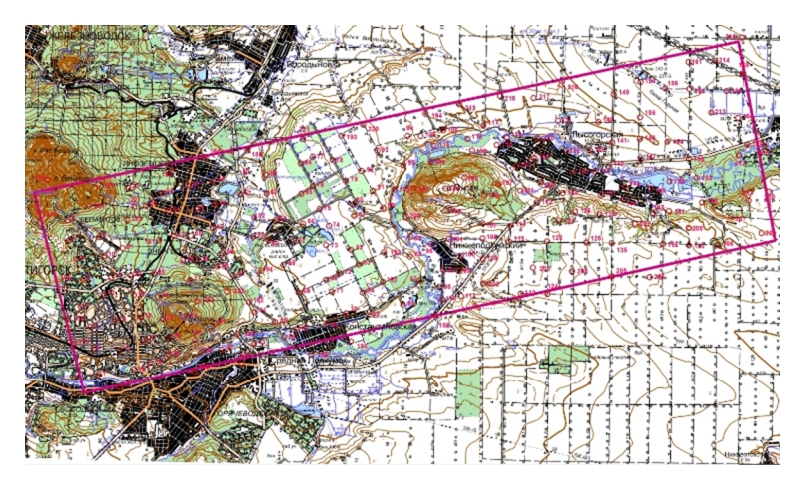
Рис. 6. Границы фотограмметрического тестового участка
Среднее квадратичное отклонение измерений по каждой плановой координате и высоте не превышала 0,2 м.
Каждая точка привязана к двум исходным пунктам. В качестве исходных послужили 7 пунктов триангуляции 2–4 классов, равномерно расположенные на территории тестовых участков, имеющие отметки геометрического нивелирования.
Оценки точности при использовании экспериментального тестового участка
Для внешнего ориентирования снимков по опорным точкам часть ошибок будет исключена. Точность геодезической обработки снимков при выполнении внешнего ориентирования зависит от набора факторов, влияние которых описывается формулой:
 ,
,
где
![]() - средняя квадратичная ошибка (СКО) единицы веса элементов внешнего ориентирования снимка;
- средняя квадратичная ошибка (СКО) единицы веса элементов внешнего ориентирования снимка;
![]() - средняя квадратичная ошибка измерений координат опорных точек на снимке;
- средняя квадратичная ошибка измерений координат опорных точек на снимке;
![]() - средние квадратичные ошибки геодезических координат опорных точек;
- средние квадратичные ошибки геодезических координат опорных точек;
![]() - количество опорных точек;
- количество опорных точек;
f - фокусное расстояние;
![]() - расстояние между опорными точками и началом координат;
- расстояние между опорными точками и началом координат;
t - масштаб изображения.
Точность геопривязки для камеры ПСС по опорным точкам может составить 5-7 м СКО при использовании высокоточных наземных GPS/ГЛОНАСС измерений.
5 ЗАКЛЮЧЕНИЕ
Разработка геометрической модели съемочных систем и собственно съемки позволит расширить области применения данных, получаемых с перспективных КК типа «Канопус-В», повысить оперативность получения геопривязанной информации.
Для этого необходимы:
Особенность построения панхроматической съемочной системы ПСС состоит в том, что изображение в ней формируется на массиве микрокадров, каждый из которых формирует изображение по законам центральной проекции. Формирование мозаики ортоизображений микрокадров осуществляется с учетом орбитального движения КА.
Для условий съемки определяющим является то, что центры фотографирования съемочных систем смещены от центра масс КА и существуют дополнительные углы разворота фоточувствительных матриц съемочных систем.
Использование тестового полигона позволит уточнить как линейные, так и угловые смещения в параметры внешнего ориентирования съемки.
На настоящий момент точность геопривязки снимков КА оценивается в 75-80 м (СКО). Однако технические характеристики системы навигации (точность звездных датчиков) видимо могут быть улучшены.
СПИСОК ИСПОЛЬЗУЕМЫХ ИСТОЧНИКОВ
1. Fraser C.S., G. Dial and J. Grodecki Generation Sensor orientation via RPCs // ISPRS Journal of Photogrammetry and Remote Sensing. - May 2006. - 60(3). - pp.182-194.
2. Fraser Clive S., Hanley Harry B. Bias-compensated RPCs for Sensor Orientation of High-resolution Satellite Imagery // Photogrammetric engineering & remote sensing journal of the american society for photogrammetry and remote sensing. - 2005. - VOL. 71. - N8. -pp.909-916.
3. Болсуновский М.А. Данные ДЗЗ высокого разрешения. ближайшие перспективы // Геопрофи. - 2. - 2006. - c.13-15.
4. Воройский Ф.С. Информатика. Новый систематизированный толковый словарь-справочник (Введение в современные информационные и телекоммуникационные технологии в терминах и фактах). - 3-е изд., перераб. и доп. - М.: Физматлит, 2003. - 760 с.
5. Каханер Д., Моулер К., Нэш С., Численные методы и программное обеспечение. - M.: Мир. - 1998. - 575 стр.
6. Лобанов А.Н. Фотограмметрия: Учебник для вузов. 2-е изд. перераб. и доп. - М.: Недра, 1984. - 552с.
(нет в тексте публикации)
Прежде всего огромная признательность Никонову Олегу Анатольевичу (начальнику отдела НПП ВНИИЭМ) и всему коллективу отдела - их поддержка позволила сделать эту работу надеемся на высоком уровне и продолжить другие работы по этой теме.
Большой вклад в работу внесла Макушева Е.В. - она в качестве аспиранта участвовала в разработке пакета "NeoGeoSat" - моделирование съемки КА "Канопус-В".
Некрасов В.В.
|
THE COPYRIGHT of THIS DOCUMENT IS THE PROPERTY OF Victor Nekrasov. © 1998-2023 Victor Nekrasov |