1. Обзор космических съемочных систем высокого разрешения
1.1. Космическая съемочная система IKONOS
Спутник IKONOS [106] (см. рис. 1.1) запущен 24 сентября 1999 года на синхронно-солнечную орбиту с периодом обращения 98 минут на высоту приблизительно 680 километров [203]. Время прохождения одной и той же территории 10:30 ежедневно. Спутник IKONOS может обеспечивать съемку заданной местности с периодом в 3 дня.

Рис. 1.1. Внешний вид спутника Ikonos.
Спектральные диапазоны:
1-метровый черно-белый (панхроматический) - 0.45 - 0.90 мм.
4-метровый мультиспектральный
Голубой: 0.45 - 0.52 мм
Зеленый: 0.51 - 0.60 мм
Красный: 0.63 - 0.70 мм
Ближний ИК: 0.76 - 0.85 мм.
Система IKONOS обеспечивает динамический диапазон данных 11 бит. Так как сенсоры системы могут обеспечивать 1-метровые панхроматические и 4-метровые мультиспектральные снимки [84,85] с отклонением от надира до 60 градусов по любому азимуту, то стерео возможности обеспечиваются как вдоль, так и поперек траектории [124].
Стерео данные системы IKONOS
Стерео возможности системы IKONOS [82,114] обеспечиваются тремя особенностями: возможность наклонной съемки по любому азимуту, отношение (B/H) от 0.6 и более (сходное с аэроснимками) и высокое разрешение. Возможность наклонной съемки обеспечивает стереоскопическое изображение при съемке с различных орбит, как у системы SPOT-HRV, так же как и возможность стереосъемки вдоль траектории как у систем SPOT-HRS, JERS-1. Стереоснимки IKONOS распространяются как квази-эпиполярные [192], где оставлен только высотный параллакс. Доступ к описанию точной геометрической модели сенсора затруднен, поэтому для обработки как одиночных снимков, так и стереопар используется модель рациональных полиномиальных коэффициентов (Rational polynomial coefficients - RPC) [71,100,112,113,114,129,132,174]. Сравнение результатов обработки с использованием точной и приближенной моделей снимков Ikonos приведено в [73,181,213]. В настоящее время предложены различные алгоритмы получения ЦМР по данным системы Ikonos [209]. Существующие методы обработки стереопар системы Ikonos позволяют получать угловую точность 1-2 градуса и позиционную точность до 1 пиксела [194].
1.2. Космическая съемочная система QuickBird
Спутник QuickBird-2 [106] (см. рис. 1.2) предназначается для съемки поверхности Земли с разрешением 60 см в черно-белом режиме и 2,5 м в мультиспектральном режиме что уже сравнимо с характеристиками снимков цифровых аэросъемочных комплексов [1]. Спутник построен компанией Ball Aerospace & Technology, его владельцем является компания EarthWatch. Основные характеристики спутника [154] приведены в таблице 1.1.

Рис. 1.2. Внешний вид спутника QuickBird.
Таблица 1.1
Основные характеристики системы QuickBird.
Информация о запуске |
18 октября 2001 |
|
Орбита |
Высота: 450 км, наклонение 98 градусов,
синхроно-солнечная орбита |
|
Объем данных за виток |
~128 гигабайт ( приблизительно 57 изображений отдельных территорий) |
|
Полоса захвата и размер области |
Номинальная ширина полосы захвата: 16.5-километров в
надире
|
|
Метрическая точность |
23-метровая круговая ошибка, 17-метровая линейная ошибка (без наземного обеспечения) |
|
Разрешение сенсора и спектральный диапазон |
Панхроматический
|
Мультиспектральный
|
Динамический диапазон [51] |
11-бит на пиксел |
|
Система связи |
Данные с полезной нагрузки
|
Служебная
|
Система стабилизации |
Стабилизированная по 3 осям, звездный датчик/инерциальная система/GPS |
|
Точность указания |
Точность: менее 0.5 миллирадиан на ось |
|
Бортовая память |
Емкость 128 Гигабайт |
|
Платформа |
Рабочее тело на 7 лет |
|
Для обработки как одиночных снимков, так и стереопар используется модель рациональных полиномиальных коэффициентов (Rational polynomial coefficients - RPC) [168,169]. Точность обработки одиночных снимков системой Photomod до 0.6м (СКО) [3,4], система ENVI – до 1 м (СКО) [8].
1.3. Космическая съемочная система EROS-A, EROS-B
EROS-B – это коммерческий спутник высокого разрешения компании ImageSat International N.V. штаб-квартира на Каймановых островах, с офисами в Лимасоле, Кипр и в Тель-Авиве, Израиль [11]. Платформа EROS-B идентична платформе EROS-A и базируется на платформе Ofeq Израильского министерства обороны, разработана и построена фирмой Israel Aircraft Industries Ltd. (IAI/MBT). Размеры аппарата 2.3 м высота и 4.0 м ширина, схема аппарата приведена на рисунке 1.3. Аппарат стабилизирован по 3 осям и платформа обеспечивает большую подвижность аппарата. Возможность поворота на ±45º от надира по всем направлениям. У EROS-B есть дополнительные звездные датчики. Время жизни до 6 лет. Номинальная масса при запуске 290 кг, однако дополнительное топливо (до 60 кг) расcчитано на срок службы до 10 лет.
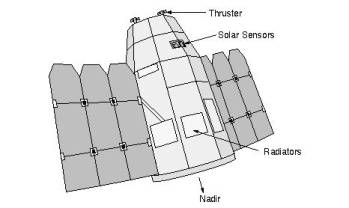
Рис. 1.3. Схема КА EROS-B
Солнечно-синхронная круговая орбита, средняя высота = 500 км, наклонение = 97.4º, местное время нисходящего узла 10:45. Примечание: Орбиты EROS-A и EROS-B фазированы в одной орбитальной плоскости для уменьшения времени повторного посещения.
КА EROS-B был запущен 25 апреля 20006 года ракетой-носителем Старт-1 с космодрома Свободный в Восточной Сибири (51.4º N, 128.3º E).
Передача данных. Изображения передаются в X-диапазоне на скорости 280 Мбит/с на наземную приемную станцию, используя передатчик мощностью 1.5 Вт и одну из двух направленных антенн. Спутники EROS управляются в S-диапазоне через одну станцию, расположенную в компании IAI/MBT в Израиле (от 3 до 4 проходов в день в видимости станции). Скорость канала S-диапазона либо 2.5 либо 15 кбит/с.
Фирма ImageSat имеет глобальную сеть наземной структуры для приема данных в реальном режиме времени. Эта сеть состоит из центральной приемной станции ImageSat, сети EROS-совместимых приемных станций на 5 континентах и EROS-совместимых приемных станций у эксклюзивных клиентов.
PIC-2 (Панхроматическая съемочная камера -2), разработана фирмой ElOp (Electro Optical Industries), Израиль, подразделением фирмы Elbit Systems Ltd. Камера EROS-B использует технологию CCD в комбинации со схемой TDI (Time Delay Integration) в фокальной плоскости, для увеличения экспозиции каждой линейки CCD детектора, для увеличения соотношения сигнал/шум. Инструмент построен на основе телескопа Кассагрена с аппертурой 50 см в диаметре и фокусным расстоянием 5 м, угол обзора 1.5º. Камера PIC-2 смонтирована на КА и направлена в надир, использует ориентацию всего аппарата для нацеливания.
CCD сканирующий детектор обеспечивает 10,000 пикселей на линию и всего 96 линий для поддержки TDI (2 CCD массива в линии). Сканирование в панхроматическом режиме обеспечивается в диапазоне 0.5 - 0.9 мкм. Разрешение на Земле составляет 0.70 м, полоса захвата 14 км в надире. Данные оцифрованы 10 бит/пиксел.
Камера КА EROS-B может работать в синхронном или асинхронном режимах. В синхронном режиме КА поддерживает постоянный курсовой угол к земнойц поверхности. В асинхронном режиме съемка выполняется в старт-стопном режиме, поворачивая платформу вдоль направления полета (в этом режиме возможна стереосъемка). Основные технические характеристики приведены в таблице 1.2.
Таблица 1.2.
Технические характеристики КА EROS-A и EORS-B
Параметр |
EROS-A |
EROS-B |
Круговая синхронно-солнечная орбита |
~500 км |
~ 500 км |
Пространственное разрешение |
1.9 м
стандартное |
0.70 м панхроматическрое |
Полоса захвата |
14 км |
14 км |
Схема сканирования |
Асинхронное сканирование |
Асинхронное
сканирование или |
Спектральный диапазон |
0.5-0.9 мкм |
0.5-0.9 мкм |
Динамический диапазон |
11 бит |
10бит |
Скорость передачи данных |
70 Мбит/с |
280 Мбит/с |
1.4. Космическая съемочная система OrbView-3
OrbView-3 – это мини-спутник, производящий съемку высокого разрешения принадлежит и управляется фирмой Orbital Imaging Corporation (ORBIMAGE) Dulles, VA, провайдера снимков земной поверхности с семейства спутников фирмы. КА имеет одну камеру OrbView High Resolution Imaging System способную получать панхроматические снимки разрешением 1 м и мультиспектральные снимки разрешением 4 м. [13,15]
КА OrbView-3 использует зарекомендовавшую себя платформу OSC разработки фирмы LeoStar (см. рис. 1.4). КА имеет размеры – цилиндр примерно 1.2 м в диаметре и 1.9 м в длину. Солнечные батареи смонтированы наверху цилиндра. КА OrbView-3 стабилизирован по 3 осям и обеспечивает точность углового позиционирования < 100 угловых секунд. Точность после обработки достигает ±12 м. КА имеет возможность позиционироваться до 50º в направлениях вдоль и поперек полета увеличивая область слежения. Масса КА около 304 кг (стартовая масса 360 кг), время жизни КА 5 лет
26 июня 2003 года в 18:53 UTC (22:53 мск) с борта самолета-носителя L-1011 Stargazer, стартовавшего в 17:57 UTC (21:57 мск) с аэродрома базы ВВС США Ванденберг и находившегося в тот момент над акваторией Тихого океана на высоте около 11 тысяч метров, стартовыми командами компании Orbital Sciences Corporation осуществлен пуск ракеты-носителя Pegasus-XL (M-34), которая вывела в космос спутник OrbView-3 (27838 / 2003 030А), принадлежащий компании ORBIMAGE.
Круговая синхронно-солнечная высота = 470 км, наклонение = 97.25 °, период = 92.5 мин, пересечение экватора 10:30 в нисходящем узле. Период посещения 3 дня, зависит от широты.
Передача данных. Бортовое записывающее устройство емкостью 32 Гбит (бортовое ЗУ предназначено для потребителей, заказывающих области вне зоны действия приемных станций. Скорость передачи данных в реальном времени в X-диапазоне 150 Мбит/с.

Рис. 1.4. КА OrbView-3
OHRIS (OrbView High Resolution Imaging System) фирмы ORBIMAGE сконструирована и построена компанией Northrop Grumman, Балтимор (основные параметры камеры см. в таблице 1.3). Цель разработки – обеспечить глобальную съемку высокого разрешения на коммерческой основе(1 м в панхроматическом режиме и 4 м в мультиспектральном). OHRIS is identical to the instrument flown on OrbView-4. OHRIS – это оптомеханическая система на основе трех-зеркального анастигматического телескопа с апертурой 45 см. Номинальный размер сцены – 8км х 8км с пространственным разрешением 1 м (Pan) и 4 м (MS) в надире. Исходные данные выдаются с диапазоном 11 бит и сжимаются до 2 бит/пиксел. Масса инструмента 56 кг.
Камера может быть запрограммирована на скорости 5000 линий в секунду, 2500 л/с, 1000 л/с или 500 л/с. Дополнительно период накопления может быть установлен полным, половиной, одно четвертой или одной восьмой полного периода. Эти режимы позволяют контролировать динамический диапазон и отношение сигнал/шум.
Таблица 1.3.
Параметры камеры OHRIS
Режим съемки |
Панхроматический |
Мультиспектральный (MS) |
Пространственное разрешение |
1 м |
4 м |
Диапазоны съемки |
1 |
4 MS |
Спектральные диапазоны |
Pan: 450 - 900 нм |
MS1:
450-520 нм (голубой) |
Размер линейки |
8000 пикселей |
2000 x 4 |
Размер пиксела линейки |
6.0 мкм x 5.4 мкм (поперек и вдоль) |
|
Динамический диапазон |
11 бит (сжатое для передачи до 2 бит/пиксел) |
|
Определение орбиты основано на системе GIPSY-OASIS (GPS-Inferred Positioning SYstem and Orbit Analysis SImulation Software) лаборатории JPL (Jet Propulsion Laboratory), Пасадена.
Операционный центр фирмы ORBIMAGE расположен в Dulles, VA.. Центр генерирует команды КА, которые предаются двумя наземными станциями: Point Barrow, Аляска и Dulles, Вирджиния. Это же станции передают телеметрическую информацию и съемочные данные для обработки и распространения.
1.5. Космическая съемочная система IRS-P5 (Indian Remote Sensing Satellite-P5)/Cartosat-1
Космический аппарат IRS-P5 (CartoSat-1) создан Индийской Организации Космических Исследований (ISRO), Бангалор, Индия (см. рис. 1.5). Цель миссии IRS-P5 состоит в обеспечении гео-инженерных (картографических) приложений, путем использования панхроматических снимков высокого разрешения позиционируемых с высокой точностью. Особенность аппарата состоит в наличии двух панхроматических камер высокого разрешения которые могут быть использованы для получения стереоизображения на пролете. В этой миссии достигнут компромисс между высоким разрешением (2.5 м на местности), мультиспектральными возможностями и малой площадью покрытия с полосой захвата 30 км. Данные системы предназначены для генерации DTM (Digital Terrain Model)/DEM (Digital Elevation Model) и использования в таких приложениях, как кадастровое картографирование, землепользование и ГИС приложениях.
Космическая платформа общая для спутников IRS-1C/1D/P3 имеет размер 2.4 м x 2.7 м (высота). Платформа стабилизирована по 3 осям (в контуре звездный датчик, магнитные гироскопы, 16 сопловый, 1 N двигатель малой тяги, 4-сопловый 11 N двигатель малой тяги). Точность позиционирования ±0.05º по всем осям, точность измерения 0.01º, стабильность (угловой дрейф) составляет 5х10-5 º/с, и точность позиционирования на земле менее 220 м.
Рис. 1.5. Внешний вид спутника CartoSat-1
Мощность источников питания 1.1 кВт. Стартовая масса 1560 кг (включая топливо). Всего 131 кг гидразина используется для обеспечения минимального времени жизни 5 лет.
Спутник IRS-P5 был осуществлен 5 мая 2005. ракетой-носителем PSLV из SDSC (Satish Dhawan Space Centre), на восточном побережье Индии. Передача данных осуществляется в X-диапазоне (2 несущие, для каждой камеры) на скорости 105 Мбит/с. Для передачи данных используется новая электронно-управляемая антенная фазированная решетка. Бортовое твердотельное записывающее устройство емкостью 120 Гбит используется для записи данных (до 9.5 мин наблюдений). Космический аппарат управляется ISTRAC (ISRO Telemetry, Tracking and Command Network) командной сетью Бангалора с использованием сети станций в Бангалоре, Lucknow, Mauritius, Bearslake в России и Biak в Индонезии. Национальное агентство дистанционного зондирования NRSA (National Remote Sensing Agency) в Хайдерабаде принимает данные и является центром обработки для миссии CartoSat-1.
Солнечно-синхронная, круговая орбита высотой 618 км, с наклонением 97.87º, периодом 97 мин, время восходящего узла 10ч 30 мин. Время повторного посещения 116 дней. Однако возможность повторного посещения через 5 дней обеспечивается наклоном по крену на ±26º.
Полезная нагрузка состоит из двух панхроматических камер аналогичных камерам на спутниках IRS-1C/D с целью обеспечить стерео снимки вперед и назад с помощью двух жестко смонтированных камер (двухлинейная стерео конфигурация). Определение разностей высот лучше, чем 5 м делает такие данные особенно пригодными для создания карт и моделирования рельефа.
PAN-F (панхроматическая вперед смотрящая камера), повернута вперед на 26º. PAN-A (панхроматическая назад смотрящая камера), повернута назад на -5º. Характеристики камер приведены в таблице 1.4. Стерео изображения получаются с небольшим временным интервалом (около 50 с) благодаря небольшим углам зрения вперед и назад двух камер. Наибольшее изменение в условиях съемки за этот период возникает из-за вращения Земли. Для компенсации задержки съемки используется алгоритм учета вращения Земли.
Таблица 1.4.
Ключевые параметры камер PAN
Параметр |
Камера PAN-F |
Камера PAN-A |
Спектральный диапазон |
500 - 850 нм |
500 - 850 нм |
Угол наклона вдоль траектории от надира |
+26º |
-5º |
Пространственное разрешение (поперек траектории x вдоль траектории) |
2.5 м x 2.78 м |
2.22 м x 2.23 м |
Радиометрическое разрешение |
10 бит |
|
Полоса захвата |
30 км |
27 км |
CCD линейка Размер элемента |
1 x 12288 |
1 x 12288 |
Оптика: |
3 |
|
Время накопления |
0.336 мс |
|
Сжатие данных |
JPEG алгоритм, сжатие 1/3.2 (макс) |
|
Скорость передачи данных |
105 Мбит/с (исходная скорость 340 Мбит/с) |
|
Номинальное отношение B/H |
0.62 |
|
Темп генерации данных двух камер на бору составляет 338 Мбит/с. Для уменьшения потока данных до 105 Мбит/с применяется алгоритм сжатия ADPCM/JPEG с коэффициентом сжатия 3.2 : 1.
Оптическая система каждой PAN камеры (см. рис. 1.6) сконструирована как трехзеркальный телескоп для достижения требований по разрешению и полосе захвата. Общий вид электронно-оптического модуля камеры показан на рисунке 1.2 . Каждая камера имеет CCD линейку из 12288 пикселей. Размер каждой PAN камеры 150 x 850 x 100 (см) и вес 200 кг.

Рис. 1.6. Общий вид электронно-оптического модуля камеры PAN.
Снимки 2-линейных стереокамер вдоль траектории могут быть использованы в большом количестве приложений, среди них создание ЦМР.
1.6. Космическая съемочная система Cartosat-2
CartoSat-2 является прямым потомком спутника CartoSat-1 (IRS-P5) Индийской Организации Космических Исследований (ISRO) (см. рис. 1.7). Целью было обеспечить получение снимков высокого разрешения (менее 1 м, с возможностью мониторинга событий) с высокоманевренного космического аппарата.
Космическая платформа общая для серии спутников IRS. Космический аппарат стабилизирован по 3 осям с помощью гироскопов, магнитной ориентации и гидразинных двигателей малой тяги. Курсовая ось аппарата направлена в надир и также является оптической осью аппарата. Точность установки для всех осей аппарата равна ±0.05º, точность измерения 0.01º, стабильность (угловой дрейф) составляет 5х10-5 º/с, и точность позиционирования на земле менее 220 м. Аппарат может быстро перенацеливаться в направлении как вдоль, так и поперек траектории до ±45º (обеспечивая способность повторного посещения раз в 4 дня).
Система обработки данных состоит из прямой системы передачи (DH) и твердотельной записывающей системы SSR. Прямая система передачи получает 10-битный цифровой видеосигнал от видеопроцессора CCD через 18 портов на скорости 4.2 Mпкс/с. Общая скорость передачи данных составляет 336 Mбит/с.
Сжатие данных. Система сжатия данных сжимает видеосигнал с отношением 1:3.2 (алгоритм JPEG). Сжатые данные кодируются по алгоритму Рида-Соломона и дополняются необходимыми служебными данными с 4 нечетных портов (канал I со скоростью 52.5 Мбит/с) и нечетных портов (канал Q со скоростью 52.5 Мбит/с). Форматированные данные передаются на землю через передатчик со скоростью 105 Мбит/с. Дополнительно форматированные данные могут быть записаны на 2 твердотельных записывающих устройства емкостью 64 Гбит.
Система электроснабжения имеет фиксированные солнечные батареи, которые обеспечивают 900 Вт при ориентации на Солнце и два NiCd аккумулятора емкостью 18 Aч. CartoSat-2 имеет стартовую массу 680 кг и время жизни 5 лет.
Спутник CartoSat-2 запущен 10 января 2007 ракетой-носителем PSLV-C7 с космодрома SDSC (Satish Dhawan Space Center), Индия (680 kg).
Солнечно-синхронная почти круговая, высота 635 км, наклонение 97.92º, период 97.4 мин, время прохождения экватора нисходящим узлом 9ч 30 мин.

Рис. 1.7. Внешний вид спутника CartoSat-2
Панхроматическая камера предназначена для получения снимков для картографических приложений. Оптическая система сконструирована как двухзеркальная отражательная система Ричи-Кретьена с вогнутым гиперболоидным первичным зеркалом и выпуклым гиперболоидным вторичным зеркалом и корректирующей оптикой. Зеркала сделаны из специального стекла марки Zerodur и облегчены на 60% по сравнению с зеркалами спутника CartoSat-1 (см. табл. 1.5). Оптическая система сконструирована для обеспечения разрешения менее 1 м поперек траектории. Разрешение вдоль траектории обеспечивается уменьшением скорости в 2.5 раза.
Космический аппарат обеспечивает различные режимы съемки: 1) непрерывная полоса в моно режиме, 2) съемка участков, 3) полосовая съемка.
Панорамная камера является CCD сканером (размер линейки 12288 пиксел), работающем в видимом спектральном диапазоне 0.5-0.85 мкм с разрешением на местности менее 1 м, и полосой захвата 9.6 км.
Таблица 1.5.
Основные характеристики панхроматической камеры
Тип инструмента |
Телескопическая система Ричи-Кретьена |
Масса инструмента |
120 кг (включая электронику) |
Средняя потребляемая мощность |
60 Вт |
Размер инструмента |
760 мм диаметр, 1600 мм высота |
Диаметр аппертуры |
700 мм |
Фокусное расстояние, F/число |
5600 мм, f/8 |
Спектральный диапазон |
0.5-0.85 мкм (панхроматический) |
Разрешение на местности |
< 1 м |
Детектор |
12288 элементная CCD линейка |
Полоса захвата |
9.6 км |
Динамический диапазон |
10 бит |
Скорость передачи данных |
336 Мбит/с |
1.7. Космическая съемочная система Монитор-Э
Монитор-Э создан Российским Космическим Агентством Роскосмос, на основе малых спутников, разработанных Государственным исследовательским центром имени Хруничева. Монитор-Э является первым спутником на основе модульной многоцелевой платформы «Яхта», предназначенной для использования в областях дистанционного зондирования, коммуникаций, космических исследований.
Космический аппарат стабилизирован по трем осям платформы «Яхта» со стартовой массой 750 кг (см. рис. 1.8). Угловая точность позиционирования 0.1º, точность управления угловым дрейфом 0.001º/с. Две солнечные батареи вырабатывают до 1200 Вт. Космический аппарат способен перенацеливаться поперек траектории до ±30º от надира с использованием гироскопической системы, обеспечивая полосу обзора больше полосы захвата. Время жизни системы ориентации до 5 лет.

Рис. 1.8. Общий вид спутника Монитор-Э
Солнечно-синхронная почти круговая орбита: средняя высота = 540 км, наклонение = 97.5º. Запуск Монитора-Э состоялся 26 августа 2005 года ностелем Рокот-Бриз-КМ с космодрома Плесецк, Россия.
Космический аппарат имеет две камеры сканерного типа конструкции С.А. Зверева, Красногорск, Россия. Общий вес 420 кг и электропотребление 450 Вт. Камеры созданы с целью использовать панхроматическое и мультиспектральное изображения для широкого спектра применений, таких как сельское хозяйство, лесное хозяйство, контроль окружающей среды, геологическое картографирование, исследование природных ресурсов, управление в чрезвычайных ситуациях. Основные характеристики камер приведены в таблице 1.6.
PSA – панхроматическая камера для мониторинга поверхности Земли, кроме того имеет название Гамма - Л.
RDSA – мультиспектральная камера для мониторинга поверхности Земли, имеет название Гамма - Ц.
Оба инструмента работают одновременно. Возможно получение снимков в следующих режимах:
1) Съемка вдоль траектории, снимки получаются в надир.
2) Полосовая съемка – в этом режиме аппарат использует возможность нацеливания в поперечном направлении (±30º) для увеличения полосы обзора.
3) В следующем режиме возможно получение стереоизображений путем быстрого перенацеливания вдоль траектории с углом до ±30º.
Таблица 1.6.
Общие характеристики камер PSA и RDSA.
Параметр |
PSA (Pan Imager) |
RDSA (MS Imager) |
Спектральный диапазон |
0.51-0.85 µm |
0.54-0.59 мкм |
Пространственное разрешение |
8 м |
20 м (40 м) |
Полоса захвата |
90 км |
160 км |
Полоса захвата поперек траектории |
780 км |
890 км |
Скорость передачи данных |
15.36 или 61.44 или 122.88 Mbit/s |
|
Выходная продукция – изображения со стандартной радиометрической и геометрической коррекцией, геокодированное изображение в географической проекции, ортотрансформированное изображение, мозаика или цифровые карты.
1.8. Космическая съемочная система Ресурс ДК
Ресурс-ДК1 – первый российский спутник дистанционного зондирования способный передавать снимки высокого разрешения (до 1 м) на наземные станции во время прохода над нами (см. рис. 1.9). Аппарат был разработан в ЦСКБ «Прогресс», Самара, Россия. Космический аппарат предназначен для мультиспектральной и спектрозональной съемки земной поверхности в видимом и ближнем инфракрасном диапазонах.
Аппарат стабилизирован по трем осям. Точность угловой ориентации 0.2 угловых минуты, точность стабилизации угловой скорости 0.005º/с. Время жизни до 3-х лет или более.
Космический аппарат имеет массу 6650 кг, высота 7.4 м, размах солнечных батарей 14 м. Ресурс-ДК1 может поворачиваться до ± 30º поперек траектории.
Система коммуникации в X-диапазоне на частотах 8.2-8.4 ГГц (скорость передачи до 300 Мбит/с). Бортовое запоминающее устройство имеет емкость 768 Гбит.
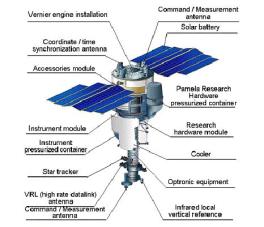
Рис. 1.9. Общий вид КА Ресурс –ДК1
КА был запущен 15 июня 2006 года ракетой-носителем Союз-ФГ с космодрома Байконур, Казахстан.
Эллиптическая полу-полярная, высота 350-600 км, наклонение = 70.0º.
Геотон-1 – это оптоэлектронная камера сканерного типа. Цель создания – получение изображений Земли высокого разрешения для коммерческих и исследовательских приложений. Камера обеспечивает съемку панхроматического и мультиспектрального изображения в 4 диапазонах видимого и ближнего инфракрасного диапазонов. Обзорный режим обеспечивает сцены длиной до 2100 км (вдоль траектории). Камера может быть повернута до (± 30º) поперек траектории поворотом всего КА (см. рис. 1.10). Основные характеристики приведены в таблице 1.7.
Таблица 1.7.
Общие параметры камеры Геотон-1
Параметр |
Значение |
Параметр |
Значение |
Панхроматический диапазон |
0.58 - 0.8 мкм |
Пространственное разрешение (PAN) |
1 м |
Мультиспектральный диапазон (мкм) |
0.50 - 0.60, 0.60 - 0.70, 0.70 - 0.80 |
Пространственное разрешение (MS) |
2.5-3.5 м |
Скорость передачи данных |
75, 150 or 300 Мбит/с |
Емкость ЗУ |
768 Гбит |
Полоса захвата |
28.3 км в надире (с высоты 350 км) |
Полоса обзора |
448 км |
Применение камеры Геотон-1: обзор состояния морской поверхности, ледовая ситуация, метеорологические условия в полярных регионах, изучение ресурсов Земли, экологические данные, кризисные ситуации.
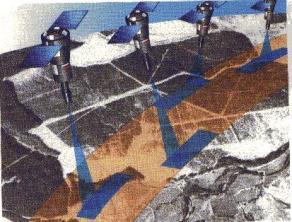
Рис. 1.10. Схема возможности обзора поперек траектории Ресурс-ДК1.
PAMELA - это магнитный спектрометр для изучения изменений заряженных частиц и нестационарных явлений в космических лучах.
ARINA – российский спектрометр и детектор частиц для исследования солнечно-магнитосферных изменений заряженных частиц.
Наземный сегмент системы Ресурс-ДК1 расположен в Научно Центре Оперативного Исследования Земли НЦ ОМЗ в Москве, Россия.
2. Обзор космических съемочных систем среднего разрешения
2.1. Космическая съемочная система SPOT
Спутники системы SPOT производят съемку Земли с 1986 года. В настоящее время работоспособны спутники SPOT 1, 2 и 4 (см. рис. 1.11). Спутник SPOT3, прекратил съемку в ноябре 1996 года по техническим причинам. Группировка спутников была увеличена в мае 2002 года запуском спутника SPOT 5 (см. рис. 1.12) [12,109,188]. Хронология миссий SPOT приведена на рис. 1.13.
Следующий спутник - SPOT5 принадлежит к последнему поколению спутников SPOT и отличается автономной системой позиционирования и контроля высоты полета, которая обладает высокой точностью.
Рис. 1.11. Внешний вид спутника SPOT4 |
Рис. 1.12. Внешний вид спутника SPOT5 |
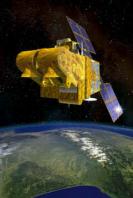
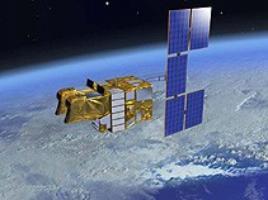
Рис. 1.13. Хронология миссий SPOT
Характеристики орбиты SPOT
Спутники SPOT позиционированы на орбите таким образом, чтобы обеспечить получение снимков Земли, которые позволяют производить их сравнение, несмотря на дату их получения. Это возможно только при выполнении следующих требований:
· Орбита спутника является фазированной, что означает, что спутник проходит над одной и той же точкой Земли через целое число дней. Цикл спутника SPOT равен 26 дням, за это время он совершает 369 витков. Орбитальный период равен 101.5 минуты. След орбиты на Земле повторяется точно через 26 дней (цикл) и спутник проходит над одной и той же точкой каждые 5 дней.
· Орбита является солнечно-синхронной, т.е. угол между плоскостью орбиты и направлением Земля-Солнце постоянен. Для спутников SPOT угол равен 22.5°, что означает, что локальное время нисходящего узла равно 10:33 (номинально от 10:15 до 10:30), (см. рис. 1.14).
· Орбита спутника околополярная. Наклонение орбиты составляет 98.8°.
· Орбита почти круговая. Это означает, что поддерживается постоянная высота над заданной точкой. Высота орбиты SPOT над точкой, расположенной на северной широте 45° составляет приблизительно 830 км.
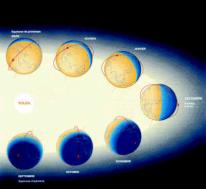
Рис. 1.14. Синхронно-солнечная орбита
Угол между плоскостью орбиты и направлением Земля-Солнце остается неизменной, поэтому данная орбита называется синхронно-солнечной. Орбитальная плоскость пересекает экваториальную плоскость в двух точках, вдоль линии, называемой линией узлов. Узел – это точка, в которой спутник пресекает экваториальную плоскость: при движении с севера на юг узел называется нисходящий, при движении с юга на север узел называется восходящим
Спутник SPOT5 – это часть системы, в настоящий момент состоящей из трех спутников семейства SPOT: SPOT1, SPOT2 и SPOT4. Первые два спутника -SPOT1 и SPOT2 не имеют бортовых запоминающих устройств. Вместе со SPOT4, эти спутники в настоящее время находятся на орбите с характеристиками, описанными в Таблице 1.8. Однако они находятся в разных орбитальных фазах относительно друг друга вдоль орбиты.
Таблица 1.8.
Номинальные характеристики орбиты SPOT
Тип |
Синхронно-солнечная |
Высота |
832 км |
Наклонение |
98.7 ° |
Период |
101.4 минуты |
Цикл |
26 дней |
Местное время |
10 : 30 |
Расположение спутников SPOT показано на рис.1.15.
 |
Рис. 1.15. Положения спутников SPOT на орбите.
Камеры
Следующая таблица 1.9. показывает основные характеристики камер на борту спутников SPOT.
Таблица 1.9.
Характеристики камер на борту спутника SPOT
Спутник |
Камера |
Наименование диапазона |
Диапазон длин волн (мкм) |
Размер пиксела (м) |
Пиксел (CCD) на линию |
SPOT123 |
HRV1 или HRV2 |
XS1 |
0.50-0.59 |
20 |
3000 |
XS2 |
0.61-0.68 |
20 |
3000 |
||
XS3 |
0.78-0.89 |
20 |
3000 |
||
PAN |
0.50-0.73 |
10 |
6000 |
||
SPOT4 |
HRVIR1 или HRVIR2 |
XS1 |
0.50-0.59 |
20 |
3000 |
XS2 |
0.61-0.68 |
20 |
3000 |
||
XS3 |
0.78-0.89 |
20 |
3000 |
||
SWIR |
1.58-1.75 |
20 |
3000 |
||
M |
0.61-0.68 |
10 |
6000 |
||
SPOT5 |
HRG1 или HRG2 |
XS1 |
0.495-0.605 |
10 |
6000 |
XS2 |
0.617-0.687 |
10 |
6000 |
||
XS3 |
0.780-0.893 |
10 |
6000 |
||
SWIR |
1.545-1.750 |
20 |
3000 |
||
HMA |
0.475-0.710 |
5 |
12000 |
||
HMB |
0.475-0.710 |
5 |
12000 |
||
HRS |
HRS1 (съемка вперед) |
0.49-0.69 |
10 x 5 |
12000 |
|
HRS2 (съемка назад) |
0.49-0.69 |
10 x 5 |
12000 |
SPOT5 – стереоскопическая камера высокого разрешения
В отличие от камеры High Geometric Resolution (HRG), телескоп HRS (Haute Résolution Stéréoscopique) не имеет зеркального механизма [92,93]. Сцены HRS (см. рис. 1.16.) снимаются вдоль следа спутника с полосой 120 км (12000 пиксел с 10–метровым разрешением). Углы телескопа составляют +20° (взгляд вперед) and –20° (взгляд назад).
Такие углы зрения приводят к углам наклона 22.748° и обеспечивают эффективное отношение B/H = 0.84 (» 2 х tg(22.748°).
Съемка вперед и назад не могут быть выполнены одновременно. В результате максимальный стерео сегмент немного больше чем 600 км (» 832 км высоты 2 х tg(20°).
Снимки производятся в тех же спектральных диапазонах, что и для камеры HRG. Размер пиксела на земле – 10м x 10м. Однако камера HRS [147] была сконструирована для получения разрешения на земле в 5 метров вдоль полета. В направлении близком к эпиполярной плоскости такое увеличение разрешения позволяет получить большую точность определения высоты в ЦМР [87,95,151,163,177-179] (абсолютное разрешение в плане от 10 до 15 метров).
Рис. 1.16. Способ съемки камеры HRS (SPOT5)
Для спутников первого и второго поколения (SPOT 1,2,3,4) получение стереоизображения осуществляется при межвитковой съемке, что затрудняет использование процедур автоматизации построения ЦМР. Получение стереопары на одном витке возможно для спутника SPOT5 [139,140]. Сравнение ЦМР получаемых при различных видах съемки приведено в [202]. Однако политика фирмы направлена на затруднение доступа к стереосъемке со спутника SPOT5. Кроме того, геометрия камер спутников серии SPOT существенно отличается от геометрии камер центральной проекции [156], что затрудняет их высокоточную обработку.
2.2. Космическая съемочная система TERRA (платформа ASTER)
Платформа ASTER (см. рис 1.17.) - результат сотрудничества между NASA и японским министерством экономики и торговли (METI), в сотрудничестве с научными и промышленными организациями двух стран. Платформа ASTER является следующим поколением инструментов дистанционного зондирования Земли сравнимых с инструментами Landsat Thematic Mapper, и японским сканером JERS-1. ASTER обеспечивает высокое спектральное разрешение в 14 диапазонах и обеспечивает стереоскопические возможности для создания ЦМР. Параметры орбиты приведены в таблице 1.10.
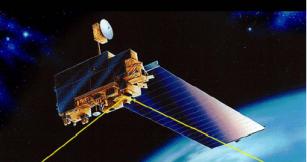
Рис. 1.17. Внешний вид спутника TERRA.
Таблица 1.10
Номинальные характеристики орбиты TERRA (ASTER)
Дата запуска: |
Декабрь 1999 |
Орбита: |
Высота 705 км, солнечно-синхронная. |
Наклонение орбиты: |
98.3 градусов от плоскости экватора |
Период обращения: |
98.88 минут |
Пересечение экватора: |
10:30 (с севера на юг) |
Период повторения: |
16 дней, (233 витка) |
Фирма-производитель: |
Lockheed Martin |
Оборудование ASTER (см. рис. 1.18.) состоит из трех различных подсистем. Каждая подсистема работает в собственном спектральном диапазоне, имеет собственный телескоп(ы) и была построена различными японскими компаниями

Рис. 1.18. Общий вид оборудования ASTER
ASTER имеет следующие подсистемы: Видимого и ближнего ИК диапазона - Visible and Near Infrared (VNIR), Коротковолнового ИК - Shortwave Infrared (SWIR), Теплового ИК - Thermal Infrared (TIR).
Подсистема VNIR
Подсистема VNIR (см. рис. 1.9.) работает в трех спектральных диапазонах в видимом и ближнем ИК, с разрешением 15 метров. Она состоит из двух телескопов – один надирный с детектором трех спектральных диапазонов и второй – смотрящий назад с одно-диапазонным детектором. Телескоп, направленный назад обеспечивает обзор цели в диапазоне 3 для стереонаблюдения. Поворот до 24 градусов поперек траектории обеспечивается поворотом всего телескопа. Разделение диапазонов обеспечивает наблюдение во всех трех диапазонах одновременно. Скорость передачи данных до 62 Мб/с при использовании всех четырех диапазонов.
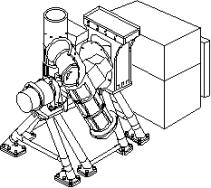
Рис. 1.19. Общий вид подсистемы VNIR.
Подсистема SWIR.
Подсистема SWIR (см. рис. 1.10.) работает в шести спектральных диапазонах в ближнем ИК через один телескоп, смотрящий в надир, и обеспечивающий разрешение 30 метров. Возможность наведения поперек траектории ( до 8550 км) обеспечивается поворотным зеркалом. Из-за большого размера комбинации фильтров/детекторов детекторы сильно разнесены, вызывая ошибку параллакса примерно в 0.5 пиксела на 900 метров высоты. Эта ошибка может быть скорректирована, если есть данные о высоте, например, ЦМР. Скорость генерации данных до 23 Мб/с.
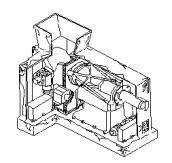
Рис. 1.20. Общий вид подсистемы SWIR.
Подсистема TIR.
Подсистема TIR (см. рис. 1.11.) работает в пяти диапазонах в тепловом инфракрасном диапазоне через один, жестко зафиксированный телескоп с разрешением 90 метров. Максимальная скорость генерации данных - 4.2 Мб/с. Сканирующее зеркало работает в режиме сканирования и обеспечивает отклонение поперек траектории (до ± 8.55 градусов). В сканирующем режиме зеркало колеблется со скоростью примерно 7 Hz и данные собираются только в одном направлении.
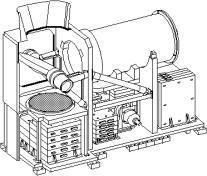
Рис. 1.21. Общий вид подсистемы TIR.
Для получения стереоперекрытия используется подсистема VNIR, имеющая два независимых телескопа с минимальной дисторсией, направленных вперед и назад. Они используются для получения стереоснимков вдоль направления полета с углом 27.7 градуса и отношением B/H = 0.6. Два телескопа могут быть повернуты на 24 градуса для обеспечения поперечного стереоперекрытия с лучшим отношением B/H (до 1) и 5-дневным периодом посещения. Однако по различным научным, технологическим и коммерческим причинам обычно используется стереоперекрытие вдоль направления полета как для сиcтемы Ikonos, так и для системы ASTER [198]. Точность обработки данных (СКО) может достигать 1 пиксел [93]. При использовании опорных точек точность может составлять СКОxy=7 м СКОz=13м [72].
2.3. Космическая съемочная система Landsat 7
Спутник Landsat-7 выведен на орбиту 15 апреля 1999 г. и имеет расчетный срок эксплуатации – 5 лет. Спутник продолжает серию природно-ресурсных спутников Landsat (первый аппарат этой серии был запущен в 1972г). Миссия Landsat-7 является совместным проектом трех крупнейших американских правительственных организаций (NASA, NOAA, USGS), призвана обеспечивать национальных и зарубежных потребителей спутниковой информацией высокого разрешения.
Спутник Landsat-7 выведен на солнечно-синхронную орбиту с временем нисходящего пересечения экватора 10:00. Основные параметры орбиты приведены в таблице 1.11.
Таблица 1.11
Основные параметры орбиты спутника Landsat 7.
Полоса захвата: |
185 километров |
Интервал повторения |
16 дней (233 витка) |
Высота |
705 километров |
Дискретизация [51] |
Лучшие 8 из 9 бит |
Бортовое запоминающее устройство |
~375 Гб (твердотельное) |
Наклонение |
Синхронно-солнечная, 98.2 градусов |
Пересечение экватора |
Нисходящий узел; 10:00 +/- 15 мин. |
Ракета-носитель |
Delta II |
Дата запуска |
Апрель 1999 |
Спутник спроектирован и создан компанией Lockheed Martin Missiles and Space (см. рис. 1.22).
Рис. 1.22. Внешний вид спутника Landsat 7.
Установленная на спутнике съемочная аппаратура – сканирующий радиометр Enhanced Thematic Mapper Plus (ETM+),
обеспечивает съемку земной поверхности в шести каналах с разрешением 30 м, в
одном ИК канале – с разрешением 60 м и одновременную панхроматическую съемку с
разрешением 15 м при ширине полосы обзора для всех каналов около 185 км.
Характеристики радиометра, имеющего 8 спектральных каналов приведены в таблице
1.12.
Таблица 1.12.
Спектральные характеристики радиометра ETM+
№ канала |
Спектральный |
Пространственное |
1 |
0.45 - 0.515 |
30 |
2 |
0.525 - 0.605 |
30 |
3 |
0.63 - 0.690 |
30 |
4 |
0.75 - 0.90 |
30 |
5 |
1.55 - 1.75 |
30 |
6 |
10.40 - 12.5 |
60 |
7 |
2.09 - 2.35 |
30 |
8 |
0.52
- 0.90 |
15 |
Для спутника Landsat-7 возможно получение стереосъемки только поперек направления полета со смежных орбит, так как производится надирная съемка [184]. Стереоскопические возможности съемки со смежных орбит ограничены вследствие следующих причин:
1. съемка возможно только на широте более 45;
2. отношение B/H мало;
3. доступны только области со средним или высотным рельефом.
Для всех перечисленных систем характерна геометрия, не совпадающая с геометрией центральной проекции, что осложняет получение высокоточных ЦМР.
Для систем, недавно принятых в эксплуатацию, таких как SPOT5, Ikonos, QuickBird, ASTER, Landsat –7 характерно относительно неполное покрытие земного шара.
Разрешение снимков, превышающее 10 метров доступно только для систем Ikonos, QuickBird, однако стоимость таких данных весьма значительна.
2.4. Космическая съемочная система ALOS
ALOS – японский спутник дистанционного зондирования Земли разработан JAXA (Японское космическое агентство, Токио, бывшее NASDA) и создан корпорациями NEC, Toshiba, Mitsubishi Electric Corp (см. рис. 1.23). Целью разработки было создание оптических и микроволновых сенсоров, данные высокого разрешения с которых могут использоваться в таких приложениях, как картографирование, мониторинг окружающей среды и чрезвычайных ситуаций. Кроме того, сообщество потребителей должно иметь данные с разрешением, достаточным для создания карт масштаба 1:25000. Для этого нужны данные с горизонтальным разрешением 2.5 м и вертикальным разрешением 3-5 м. Мультиспектральные данные с горизонтальным разрешением необходимы для классификации. Мониторинг реального времени требует иметь возможность оперативного перенацеливания КА.
Приблизительные размеры КА 6.4 м x 3.4 м x 4.3 м (x, y, z), размеры конфигурации на орбите 8.9 м x 27.4 м x 6.2 м (x, y, z, где x в направлении движения, z в надир).
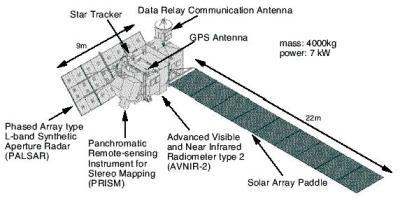
Рис. 1.23. Схематическое изображение КА ALOS
Масса КА около 4000 кг (180 кг гидразина), крупнейший спутник в Японии. Солнечные батареи (размер 22 м x 3 м) вырабатывают 7 кВт. КА ALOS имеет 5 комплектов NiCd батарей.. Время жизни КА 3 года с возможностью продления до 5 лет.
Кратковременная угловая стабильность ±0.00002º/0.37 мс (3σ), долговременная угловая стабильность ±0.0002º/5 с (3σ). Точность позиционирования ±0.0002º, точность определения координат КА ±1.0 м. The dual-frequency carrier-phase tracking GPS receiver of Toshiba Corp. is used for orbit determination.
На земле JAXA создало для КА ALOS систему PPDS (Precision Pointing and Geolocation Determination System) точного определения положения, которая обеспечивает определение положения с точностью 2.0º x 10-4, углов с точностью 1.4º x 10-4, и местоположения с точностью 3 ~ 7.5 м.
КА ALOS был запущен 24 января 2006 года японской ракетой-носителем H-IIA из космического центра Tanegashima, Япония
Солнечно-синхронная почти круговая, высота 691.65 км, наклонение = 98.16º, цикл 46 дней (с циклом 2 дня для мониторинга событий), местное время нисходящего узла 10:30 (±15 мин), период 98.51 мин.
Передача данных. Первичный канал передачи данных DRTS (Data Relay and Test Satellite of Japan) в Ka-диапазоне на скорости 240 Мьит/с и S-диапазоне для телеметрии. Дополнительно есть канал в X-диапазоне со скоростью 120 Мбит/с только для данных AVNIR-2. Канал Ka-диапазона передается на скорости 120 Мбит/с через релейный спутник Artemis Европейского космического агентства. Бортовое записывающее устройство имеет емкость 768 Гбит и использует 64 Мбит технологию. Скорость генерации данных около 1 Тбайт/день.
Сеть приема КА ALOS состоит из узлов, приведенных в таблице 1.12.
Таблица 1.12.
Партнеры ALOS по приему информации.
Агентство |
Зона покрытия |
JAXA, RESTEC (Remote Sensing Technology Center) – первичный дистрибьютор |
Азия |
Терминал ESA ADEN (ALOS Data European Node) |
Европа, Африка |
NOAA/ASF (приемная станция на Аляске) |
Северная и Южная Америки |
Geoscience Австралия (GA) |
Австралия, Океания |
GISTA (Гео-информационное и космическое агентство) |
Тайланд |
PRISM (Panchromatic Remote-sensing Instrument for Stereo Mapping) – камера для получения стереоданных высокого разрешения (размер пиксела 2.5 м) для картографических приложений (получения ЦМР и т.п.). Инструмент является трехлинейным сканером с тремя независимыми оптическими системами для надира, вида вперед, вида назад для получения стерео перекрытия вдоль полета. Каждый из трех телескопов имеет трех зеркальную оптику (30 см апертура и 2 м фокусное расстояние) и несколько CCD детекторов для сканирования. Шесть или восемь матриц CCD (5000 пикселей каждая) физически расположены в фокальной плоскости телескопов. Из 40,000 пикселей каждого телескопа, 14,000 пикселей выбираются и передаются на приемную станцию. Таким образом, триплет изображений содержит три раза по 14,000 пикселей/линию. Надирный телескоп обеспечивает полосу съемки 70 км (28,000 выходных пикселей), каждый из вперед и назад смотрящих телескопов обеспечивает полосу 35 км (14,000 пикселей на диапазон). Передний и задний телескопы наклонены на ±23.8º от надира и обеспечивают отношение B/H=1 на высоте 692 km (см. рис. 1.25). Параметры камеры PRISM приведены в таблице 1.13, схематическое изображение камеры на рис. 1.24. Оптика камеры PRISM смонтирована на оптической скамье с термостабилизацией ±3º C для минимизации дисторсии оптики.
Таблица 1.13.
Параметры камеры PRISM
Параметр |
Панхроматический сенсор |
Спектральный диапазон (панхроматический) |
0.52-0.77 мкм |
Количество камер |
3 (надир, вперед, назад) |
Угол наклона вперед и назад |
± 23.8º |
Сигнал/Шум, MTF |
> 70, > 0.2 |
Пространственное разрешение на Земле |
2.5 м (3.61 мкрад) |
Полоса съемки |
35 км (стерео триплет) 70 км для надира, или надир+назад |
Угол съемки |
≥ 7.6º |
Стерео съемка |
B/H = 1.0 |
Количество пикселей |
28,000 (полоса 70 км), 14,000 (полоса 35 км) |
Угол отклонения |
±1.5º (поперек траектории, режим триплет) |
Динамический диапазон |
8 бит/пиксел |
Скорость передачи данных |
960 Мбит/с сырых данных, компрессия JPEG с потерями. Реальная скорость камеры PRISM уменьшена до 240 Мбит/с (уменьшение 1/4.5) или до 120 Мбит/с (уменьшение 1/9) |
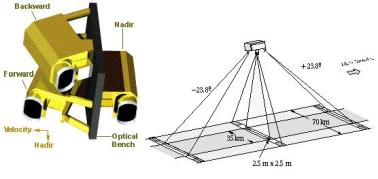
Рис. 1.24. Схема камеры PRISM и сканирование триплета
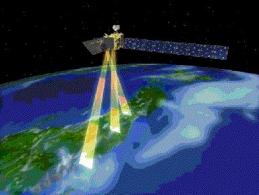
Рис. 1.25. Сканирование камерой PRISM
AVNIR-2 (Advanced Visible and Near-Infrared Radiometer) - камера, созданная фирмой Mitsubishi Electric Corporation (см. Табл. 1.14). Предназначена для получения мультиспектральных данных высокого разрешения (10 м). Оптическая система выполнена по схеме "folding Schmidt". Телескоп имеет апертуру 24 см в диаметре и фокусное расстояние около 800 мм. Камера AVNIR-2 может быть отклонена на ±44º поперек полета для целей мониторинга чрезвычайных ситуаций (см. рис. 1.26). Матрица CCD детектора имеет 7000 пикселей в линейке. Камера может применяться для мониторинга региональной окружающей среды. Компрессия почти без потерь DPCM (дифференциальная импульсно-кодовая модуляция) с кодированием Хаффмана применяется для уменьшения потока данных со 160 Мбит/с до 120 Мбит/с.
Таблица 1.14.
Основные параметры камеры ANVIR-2
Параметр |
Мультиспектральный сенсор |
Спектральные
диапазоны |
0.52-0.60 мкм 0.61-0.69
мкм |
Сигнал/шум, MTF |
>200, > 0.25 |
Пространственное разрешение |
10 м (в надире, 14.28 мкрад) |
Полоса захвата |
70 км, 5.8º |
Угол отклонения |
±44º |
MTF |
Диапазон 1-3 ≥ 0.25; диапазон 4 ≥ 0.20 |
Динамический диапазон |
8 бит |
Скорость передачи |
около 160 Мбит/с сырых данных, 120 Мбит/с (уменьшение 3/4) |
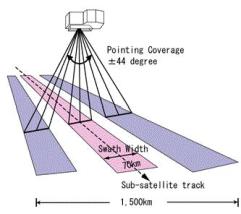
Рис. 1.26. Иллюстрация возможностей съемки камерой AVNIR-2
PALSAR (Phased Array L-band Synthetic Aperture Radar) – радар с синтезированной апертурой разработан JAXA, JAROS (Japan Resources Observation System Organization) и METI (министерство экономики, торговли и индустрии).
2.5. Космическая съемочная система «Комета»
Топографическая камера ТК-350 и панорамная камера высокого разрешения КВР-1000, вместе с датчиками для определения элементов внешнего ориентирования снимков в полете, образуют космическую картографическую систему, предназначенную для создания топографических и цифровых карт [101]. При этом фотокамера ТК-350 позволяет получать высокоточные стереопары, пригодные для построения фотограмметрических сетей и создания рельефа, а фотокамера КВР-1000 предназначена для получения снимков высокого разрешения, необходимых для дешифрирования объектов местности.
2.5.1. Топографическая камера ТК-350
Как известно, точность определения высот точек местности при стереофотограмметрической обработке снимков существенно зависит от отношения величины базиса фотографирования (В) к высоте съемки (Н). При использовании космической съемки, когда практически нельзя иметь Н менее 200 км, увеличить отношение В/Н можно только за счет увеличения формата кадра. Это привело к созданию камеры большого формата в США [104] и камеры большого формата ТК-350 в России [101,143]. Основные характеристики камеры ТК-350 приведены в таблице 1.15.
Таблица 1.15
Технические характеристики камеры ТК-350
Фокусное расстояние |
350 мм |
Формат кадра |
300 х 450 мм |
Относительное отверстие |
1:5,6 |
Разрешающая способность |
80 л/мм - в центре 35 л/мм - на краю |
Дисторсия |
20 мкм - максимальная 2.5 мкм - ср.кв.ошибка калибровки |
Контрольные кресты |
Через 10 мм |
Компенсация сдвига изображения |
Есть |
продольное перекрытие |
20%, 40%, 60% и 80% |
При создании камеры ТК -350 основное внимание было уделено увеличению базиса фотографирования и повышению точности снимков. В связи с этим был выбран прямоугольный формат, когда при съемке длинная сторона кадра располагается вдоль линии полета. Перекрытие 80% позволяет сделать отношение В/Н равным 1.1 (рис. 1.27).
Выравнивание фотопленки осуществляется путем ее прижима к выравнивающему стеклу прокатывающимися валиками, в момент экспонирования пленка удерживается на стекле вакуумным способом по периферии кадра [42]. Учитывая высокую точность изготовления выравнивающего стекла, этот способ позволяет обеспечить среднюю квадратическую ошибку из-за невыравнивания фотопленки 1.5-2.0 мкм.
Рис. 1.27. Схема перекрытия снимков камеры ТК-350
По всему полю кадра с дискретностью 10 мм на выравнивающем стекле нанесены контрольные и координатные кресты (всего 1305 крестов), координаты которых калиброваны со средней квадратической ошибкой 2.0-2.5 мкм. Это позволяет с максимально возможной точностью учитывать деформацию фотопленки.
Система координат контрольных крестов камеры ТК-350 и методика измерения подвижки приведены в Приложении. Калибровка камеры ТК –350 - определение элементов внутреннего ориентирования и дисторсии, выполняется на высокоточном пространственном компараторе.
При установке камеры в КА калибруется также стекло иллюминатора, измеряется состав газовой среды внутри КА, а в полёте измеряются фактические значения температуры и давления. Это позволяет учесть влияние иллюминатора, внутренней рефракции и внести поправки в фокусное расстояние камеры. В результате всех наземных калибровок и измерений в полёте суммарная средняя квадратическая ошибка снимков, полученных камерой ТК-350 составляет 5 мкм.
2.5.2. Панорамная фотокамера КВР-1000
Обеспечивая высокую точность стереоснимков, что необходимо для определения планового положения и высот точек местности, топографическая камера ТК-350 позволяет получить разрешение на местности 10 м. Чтобы обеспечить высокое разрешение на местности при большой ширине захвата, для получения дешифровочных снимков в состав космической системы «Комета» входит камера высокого разрешения КВР-1000. При создании камеры КВР-1000 была выбрана конструктивная схема панорамного фотоаппарата [186], при которой высокий уровень разрешения, соответствующий центральной части поля зрения объектива, сохраняется по всему кадру и можно получить изображение широкой полосы местности [144]. Основные характеристики панорамной камеры КВР-1000 приведены в таблице 1.6.
Таблица 1.16
Характеристики панорамной камеры КВР-1000
Фокусное расстояние |
1000 мм |
Формат кадра |
180 х 720 мм |
Угол поля зрения |
110 40’ |
Относительное отверстие |
1:5 |
Разрешающая способность |
60 л/мм |
Дисторсия вдоль щели |
16 мкм - максимальная |
Способ панорамирования |
вращением зеркал |
Угол панорамирования |
±200 40’ |
Компенсация сдвига изображения |
децентрированием оси вращения зеркала |
Ошибка компенсации сдвига изображения |
не более 1% |
ширина щели |
0,3-15 мм |
продольное перекрытие |
6-12% |
Панорамная камера КВР-1000 обеспечивает разрешение на местности 2м при высоте съёмки 220 км и полосе захвата 160 км. Таким образом, площадь, покрываемую одним кадром ТК-350, покрывают 7 кадров КВР-1000 при совместном включении обеих камер, как показано на рис.1.28.
Рис. 1.28. Взаимное расположение кадров КВР-1000 и ТК-350
Схема камеры КВР-1000 показана на рис.1.29.
Рис. 1.29. Схема камеры КВР-1000.
Панорамная камера КВР-1000 обеспечивает получение высококачественных панорамных снимков, пригодных для изготовления крупномасштабных фотопланов и ортофотопланов. При этом необходимо использовать геометрическую модель панорамного изображения, учитывающую перечисленные калибровочные параметры.
2.5.3. Возможности космической картографической системы
Космическая картографическая система, включающая топографическую камеру ТК-350, панорамную камеру КВР-1000 и бортовую аппаратуру для определения элементов внешнего ориентирования топографических снимков в полёте предназначена для создания крупномасштабных топографических и цифровых карт. Бортовая аппаратура включает два звездных фотоаппарата, лазерный высотомер, навигационные датчики и приборы синхронизации. Картографические возможности системы приведены в таблице 1.17.
Таблица 1.17
Картографические возможности системы «Комета»
Тип фотокамеры |
ТК-350 |
КВР-1000 |
Средняя высота фотографирования |
220 км |
220 км |
Масштаб фотографирования |
1:630 000 |
1:220 000 |
Площадь, покрываемая кадром |
284х189 км |
158х40 км |
Точность картографирования без использования наземной опоры |
||
точность планового положения |
20-25 м |
- |
Точность определения высот |
10 м |
- |
Точность картографирования относительно наземной опоры |
||
Точность планового положения |
15-20 м |
7-10 м |
Точность определения высот |
5-7 м |
- |
На настоящий момент накоплен огромный архив снимков, полученных в течение двадцати запусков системы «Комета». Данный архив покрывает большую часть земного шара. Обобщенная схема покрытия земного шара снимками ТК-350 приведена на рис.1.30.
Как видно из таблицы 1.17, использование снимков ТК-350 и КВР-1000 позволяет создавать топографические карты масштаба 1:50 000, а также цифровые и тематические карты с указанными точностями без использования наземных опорных точек на любой территории. Снимки КВР-1000 позволяют создавать фотопланы и ортофотопланы масштаба до 1:10 000. Необходимо отметить возможность дальнейшего повышения точности при использовании, например, GPS-точек [108,127].
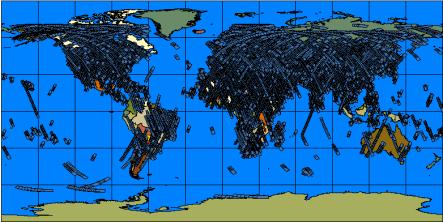
Рис. 1.30. Обобщенная схема покрытия земного шара снимками ТК-350